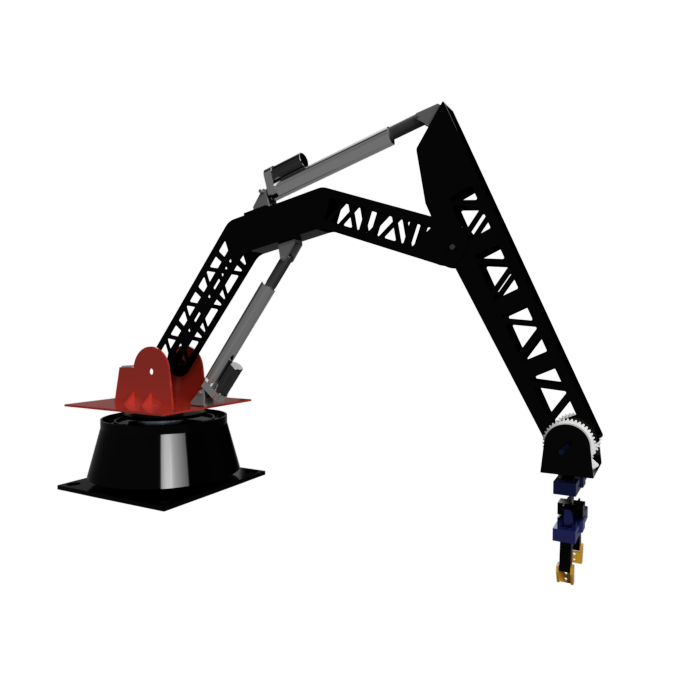
Designed, modelled and manufactured a linear actuator-based robotic manipulator and bevel gear differential based end-effector according to competition workspace constraints, performed static and dynamic analysis
Achieved a 30% reduction in weight as well as an increase in workspace of the arm
Designed robotic arm concepts for several design challenges
Rover and Manipulator Controls:
Deployed encoder feedback-based PID controller interfaced with ROS, for robotic manipulator, 6-wheeled differential drive and on-board testing assembly
Experimenting with trajectory planning algorithms like Probabilistic Roadmap
Autonomous Navigation:
Created a simulation environment using ROS and Gazebo with necessary sensor plugins
Developed YOLOv8 based arrow detection system and RRT-based path-planner for autonomous navigation task